過去の研究テーマ
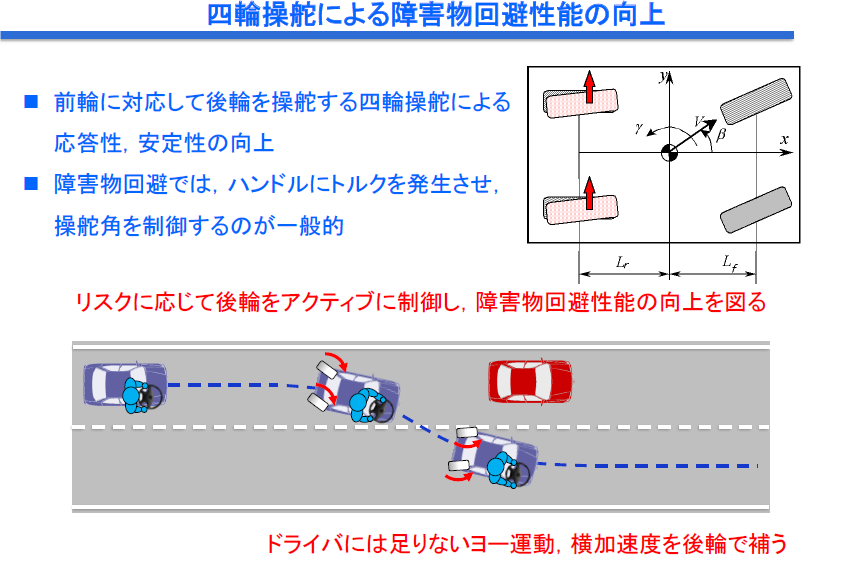
4WS制御
本研究は、四輪操舵による障害物回避性能の向上を目的としている。現在、車両の応答性や安定性の向上のために前輪に応じて後輪を操舵する四輪操舵制御などが実装されているが、障害物回避では、ハンドルにトルクを発生させ、操舵角を制御するのが一般的である。本研究では、リスクに応じて後輪をアクティブに制御し、障害物回避性能の向上を図った。具体的には、上記のようなレーンチェンジの場面を想定し、ドライバには足りないヨー運動および横加速度を後輪で補い、シミュレーションによってその有効性を検証した。
EV運動制御
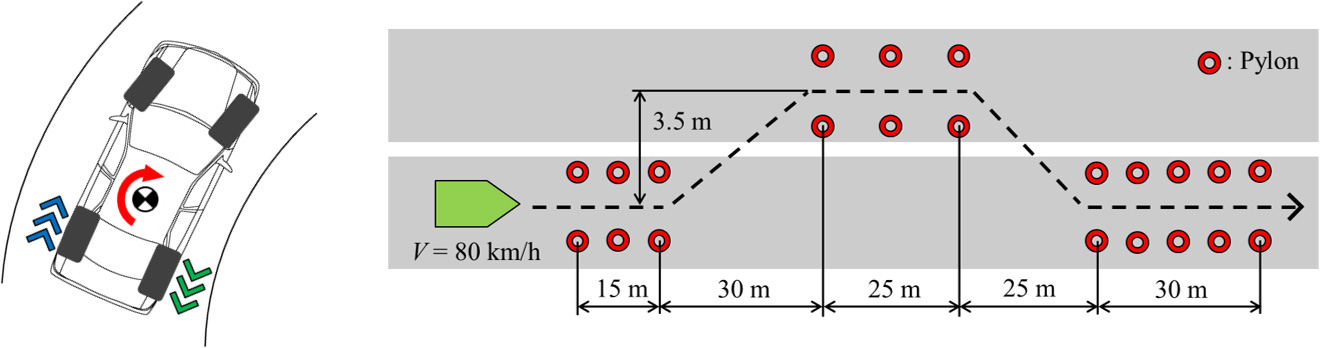
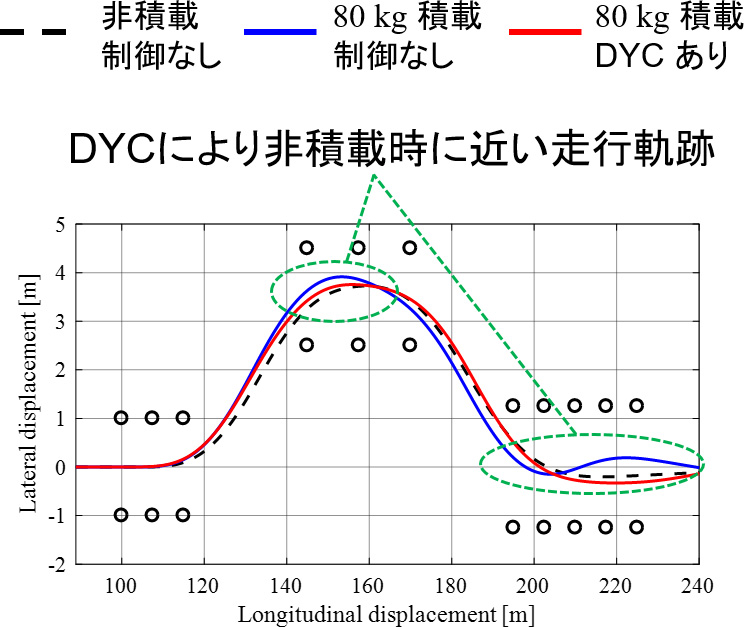
電気自動車のダイレクトヨーモーメント制御
次世代の電気自動車は、走行時の消費エネルギーの観点から軽量化と走行抵抗の低減が求められる。これらの自動車は、重い積載荷重による車両運動特性の変化が通常の乗用車に比べて大きく、空車時に比べて操縦安定性が低下しやすいという問題点がある。本研究では、この問題を克服するため、電気自動車の構造的特徴であるインホイールモータを活かして、左右輪の独立駆動力配分によるヨーモーメント、すなわち直接ヨーモーメント制御(DYC)を用い、重量変化に対する運動特性の感度を低減する運動制御システムを設計した。ドライビングシミュレータ実験を行い、提案手法によって、非制御時に比べ、緊急回避試験における車両挙動の安定性および運転者の操舵余裕度が向上することを確認した。
仮想斥力場
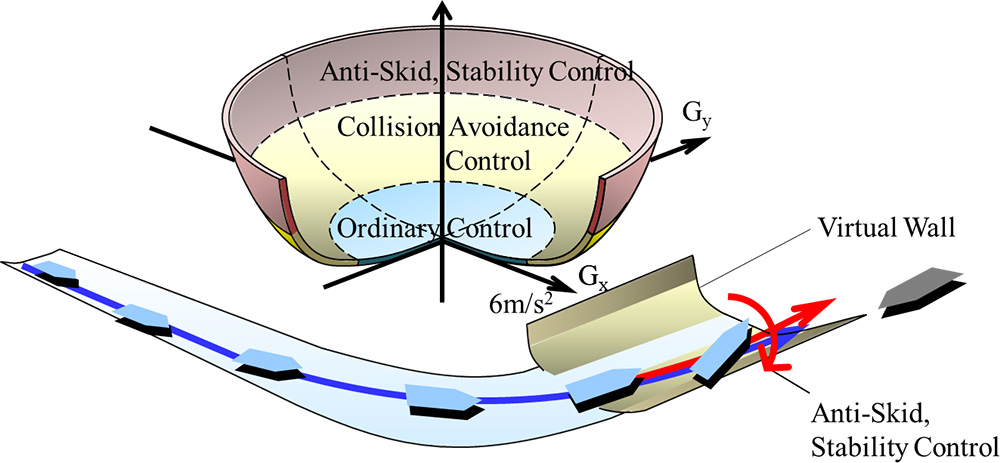
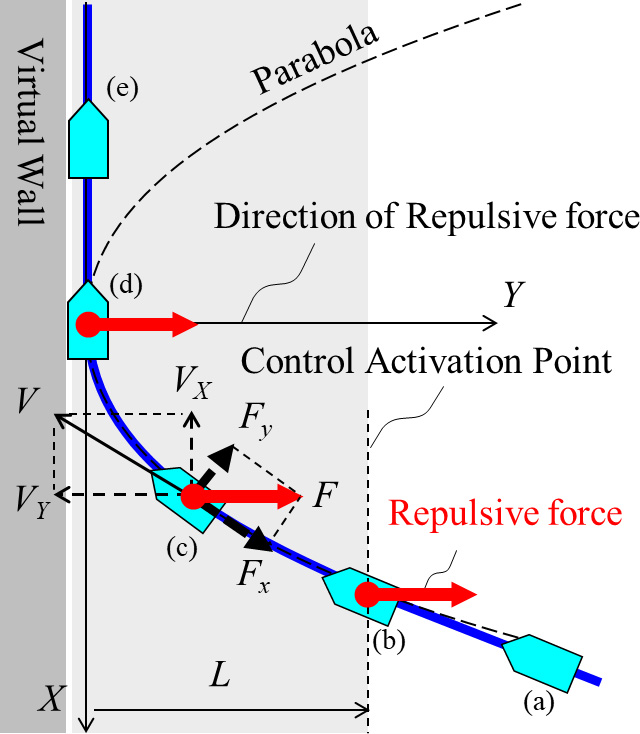
仮想斥力場による衝突回避制御
予防安全システムや自動運転システムの想定衝突回避シーンが複雑化するに伴い、タイヤ摩擦限界や各種アクチュエータの特性を考慮し、物理的に理解が容易で合理的な2次元平面上の制御理論が求められている。そこで本研究では、障害物から仮想的に発生する一定の斥力場を想定した2次元的な回避制御手法を提案した。障害物から仮想斥力を受ける考え方によって、前後方向と横方向の制御を統一的に扱うことができる。これにより、減速度と操舵角を統合した衝突回避制御が可能となる。
リスク予測
交差点での衝突回避制御に関する研究
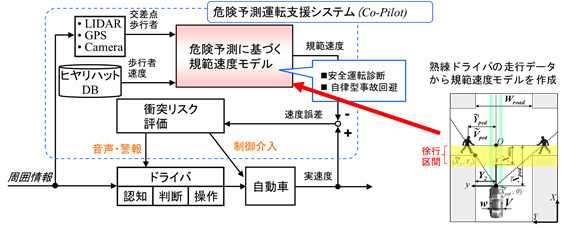
無信号交差点通過時の危険予測ドライバモデル
信号のない交差点における歩行者事故は多く、その低減が望まれている。これまでの衝突回避システムは障害物検出に基づいて回避を実行するため、交差点の見通しの悪さや、歩行者の出現の仕方によっては衝突が回避できない状況が存在する。一方、熟練ドライバはこのような状況においても、経験則に基づき安全運転を実行していると考えられる。そこで、信号のない交差点通過時の熟練ドライバの運転行動を解析し、交差点安全通過速度モデルを構築した。さらにこのモデルを自動ブレーキシステムに応用し、シミュレーションによって対歩行者衝突事故回避の可能性を示した。
- 本研究の成果の一部は、公益社団法人自動車技術会の2014年春季大会において、第64回自動車技術会賞、浅原賞学術奨励賞を受賞しました。
交差点での衝突回避制御に関する研究
本研究は、交差点右折時において、死角からの飛び出しとの衝突を回避するリスク予測自動ブレーキ制御システムに関するものである。危険予測ブレーキシステムは、仮に死角から二輪車などが飛出してきたとしても緊急回避ブレーキで十分止まれる速度まで予め減速するシステムである。さらに、飛出してきた対象に対し、緊急回避自動ブレーキの作動によって衝突を回避する。実験車両を用いて危険予測ブレーキシステムの有効性を検証した。
- 本研究の成果の一部は、FAST-zero’ 17 best paper awardを受賞しました。

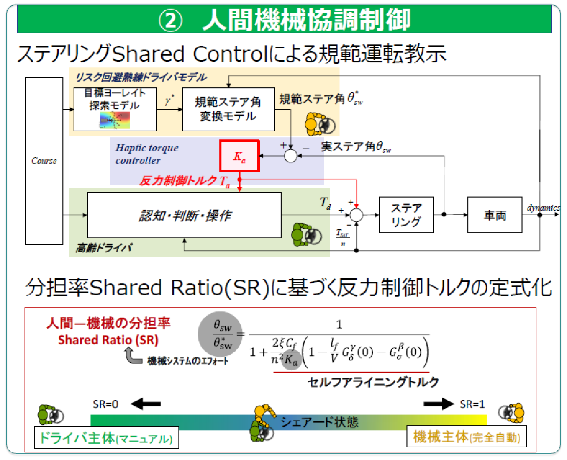
シェアード・コントロール
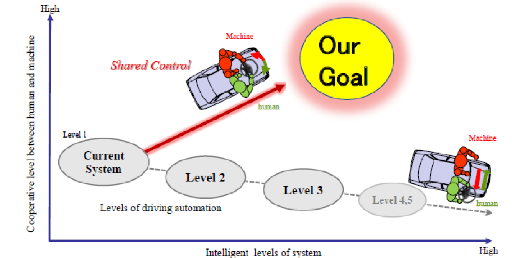
本研究では、曲線路走行場面においてスムーズな運転行動を実現するため、操舵支援制御に加減速制御を組み合わせたシェアード・コントロール型運転支援システムの設計を行った。目標曲率生成に基づく規範操舵ドライバモデルと、その操舵行動に連携した規範加減速モデルを同時に演算可能な規範ドライバモデルを構築し、熟練ドライバによる実路走行データと比較した。また、ドライビングシミュレータ実験を行い、その規範運転教示による車線追従支援効果を確認した。
- 本研究の成果の一部は、AVEC2018 best paper awardを受賞しました。
プレビューサスペンション制御
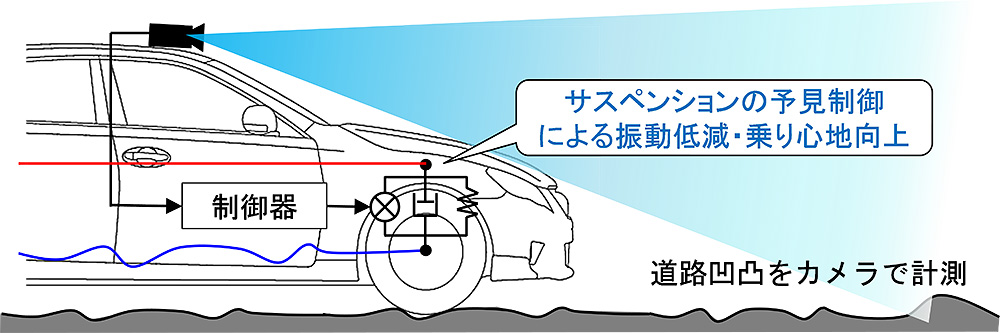
プレビュー路面センシングとサスペンション制御
本研究は、自動車の快適性を向上させるサスペンションの予見制御システム(プレビュー制御)に関するものである。ステレオカメラで撮影した前方路面の画像から、リアルタイム路面変位(凹凸)計測を実現した。計測した路面変位を用いてプレビューサスペンション制御シミュレーションを行った結果、従来の制御手法に比べ、乗り心地およびタイヤの接地性向上への効果を示した。
- 本研究の成果の一部は、2016年第21回知能メカトロニクスワークショップにおいて優秀講演賞を受賞しました。(受賞者:上浦和明さん)
- 本研究の成果の一部は、2018年度日本機械学会 交通・物流部門 部門大会賞を受賞しました。
http://www.tuat.ac.jp/NEWS/winning/20190315_01.html
セミトレーラー駐車制御
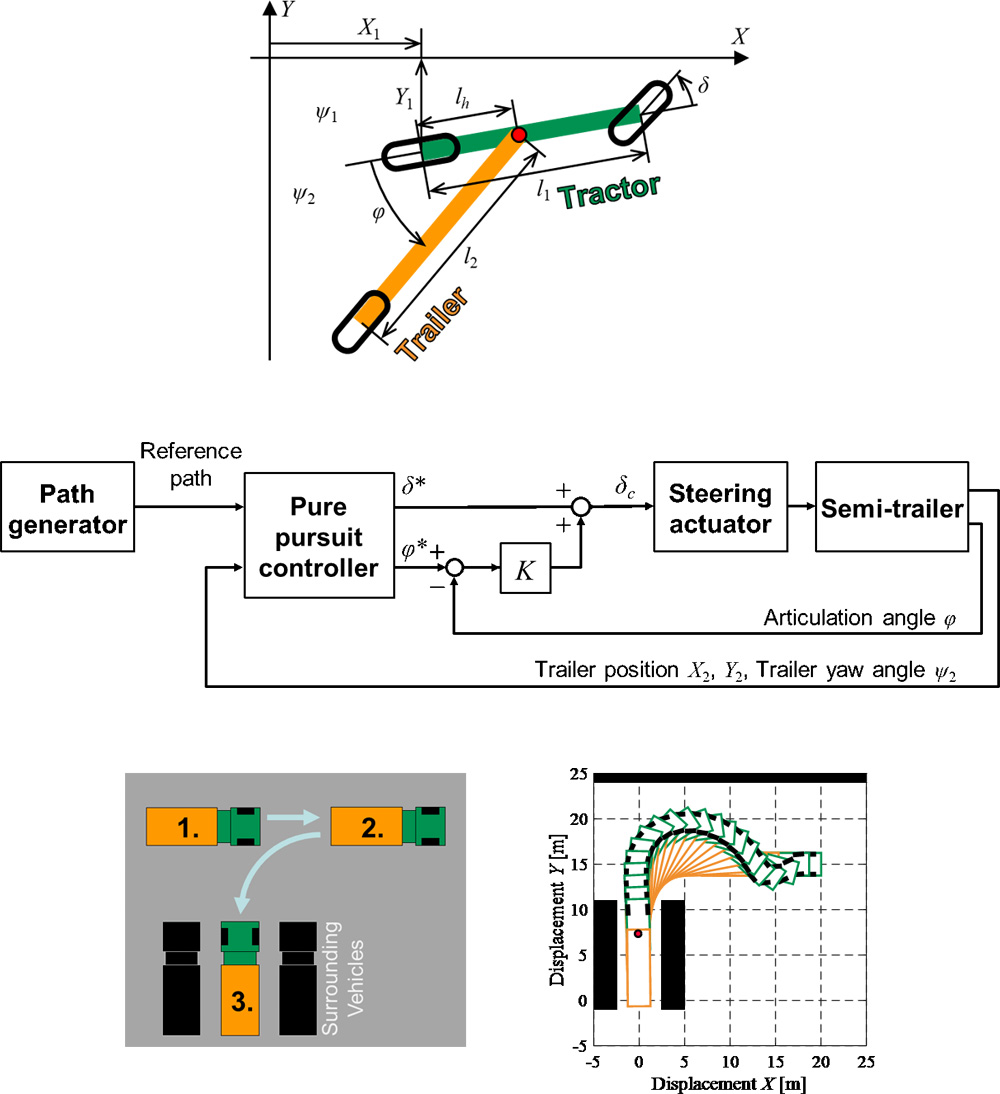
セミトレーラーの自動駐車制御
大型商用車ドライバ不足問題で、複雑な運転操作の自動化が求められている。本研究では、セミトレーラーの後退駐車の自動化を目的とし、Pure Pursuit法による Motion Plannerと連結角誤差フィードバック補償に基づく経路追従制御系を構築した。また、自動操舵機構を備える車両にその操舵制御アルゴリズムを実装し、その有効性を検証した。
COPYRIGHT ©2019 PONGSATHORN LAB. ALL RIGHTS RESERVED.
ページトップへ