低速自動運転(COI)(2013-2021)
革新的イノベーション創出プログラム(JST COI-STREAM)
「人がつながる移動イノベーション拠点」(2013-2021年度)
革新的イノベーション創出プログラム(COI STREAM)
本研究室では,名古屋大学COI(「人がつながる“移動”イノベーション拠点」~高齢者が元気になるモビリティ社会~)と協力し、知能化モビリティ研究の一環として、ゆっくり自動運転を実現するための規範ドライバモデル構築の研究を行っています。
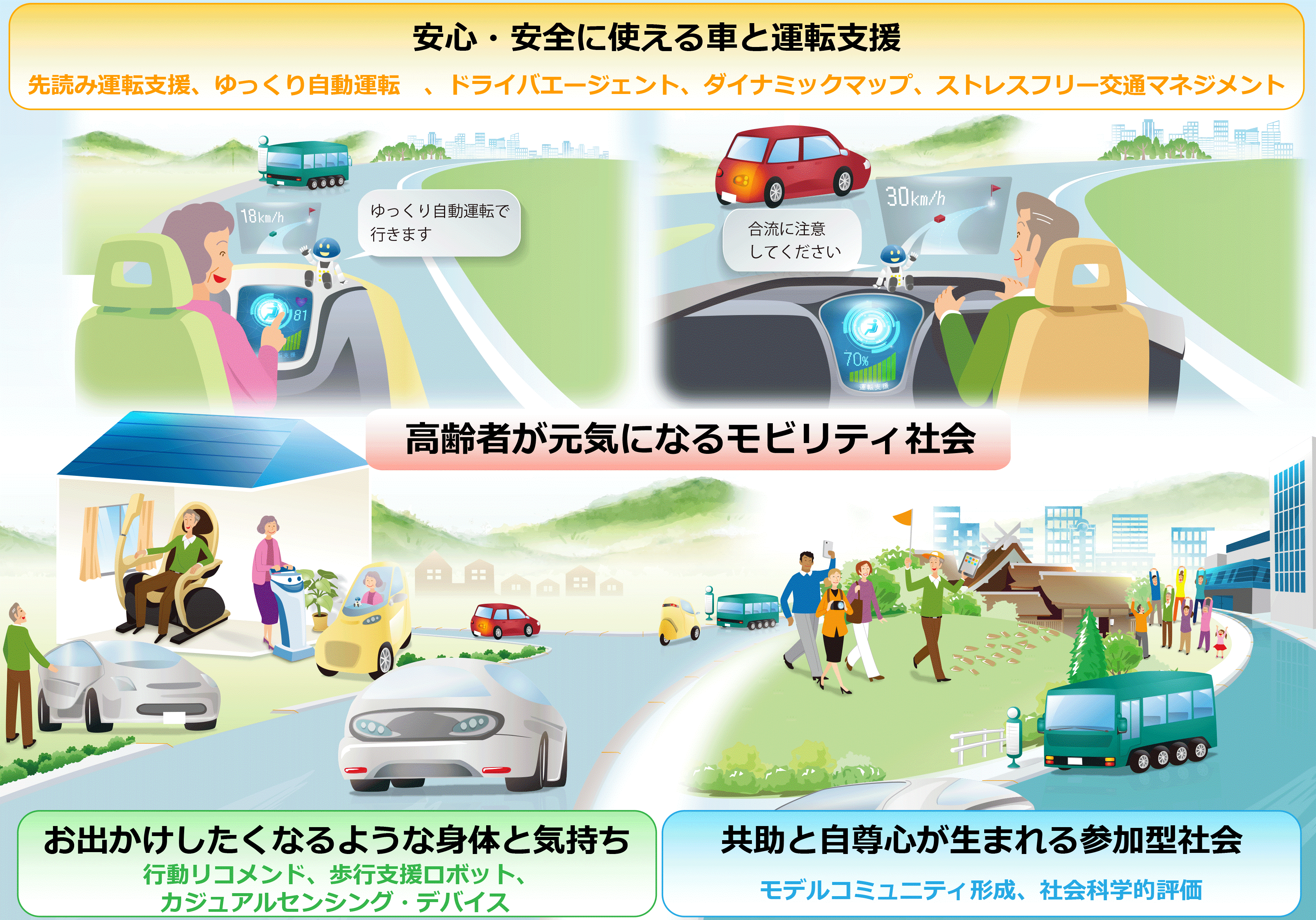
高齢化社会の中で、全ての人が地域差・個人差なくいつまでも社会の現役として活躍できる社会を実現するために高齢者が自らの意思でいつでもどこへでも移動でき、高齢者の外出頻度と社会参加率が増加し主観的幸福度が向上する「高齢者が元気になるモビリティ社会」を実現します。
高齢者自身の情報を活用した健康維持と外出誘導により【お出かけしたくなるような身体と気持ち】を創り、【安心・安全に使える車と運転支援】によって楽しく移動し、人がつながるような 【共助と自尊心が生まれる場と仕組】のしくみの社会実装をめざします。特に、ゆっくり自動運転Rを開発し、運転が苦手な人も運転できない人も安全安心で楽しく移動できるモビリティを提供することを目的とします。
出典:名古屋大学COI拠点から
低速自動運転車両の軌道計画と運動制御
近年、高齢者等の移動弱者の生活をサポートするために低速自動運転車両による支援が注目されている。しかし、低速自動運転車両は巡航速度、最大加速度に制限があるため、道路巡行時に既存の交通流を妨げることが挙げられる。本研究では、低速自動運転車両が道路巡行中に後続車に道を譲るシステムを構築することを目的とし、後続車両を検知し、後続車両に対して退避開始すべきタイミングの検討を行った。さらに、乗客にとって乗り心地の良い退避軌道を生成する機能に関する検討を行った。具体的には、一定の減速度を想定した場合に最も横加速度が小さくなる、なめらかな退避軌道を生成し、等価二輪モデルや非線形四輪車両モデルを用いた追従シミュレーションによりその有効性を検証した。

ドライバモデル構築の研究
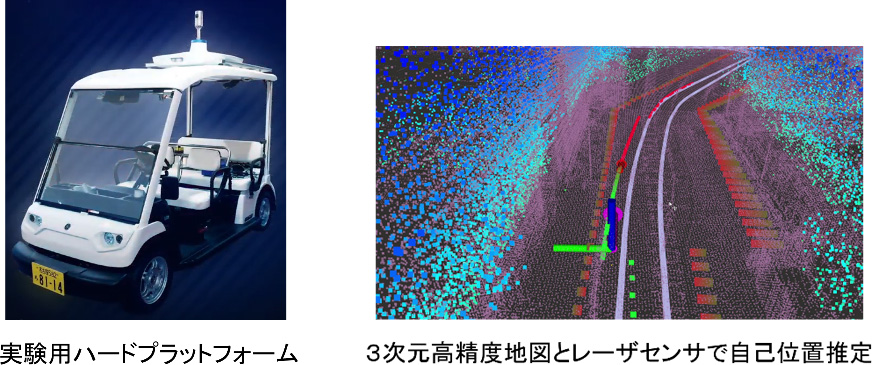
①ダイナミックマップを活用したセンサ情報の共有
ダイナミックマップとは、従来の地図情報(車線、白線等)に加えて、動的情報(車両位置、渋滞、天気等)を地図と関連付けて管理、共有するためのフレームワークである。
他車のセンサによって発見した周辺の交通参加者情報をダイナミックマップと共有することにより、自車の死角にいる歩行者等の早期発見が期待されている。

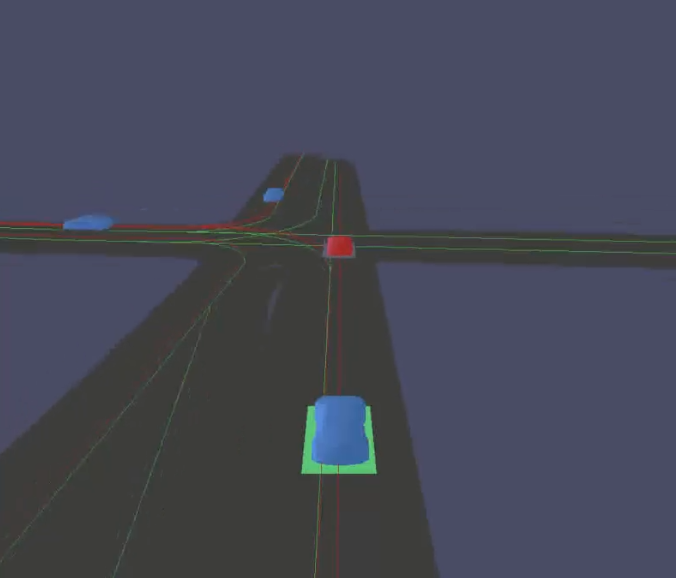
②ダイナミックマップを活用した右左折合流調停
右左折合流等の複雑な運転を自動化するために、ダイナミックマップ上で各車両の経路競合を発見し、車速の調整により、合流調停方法の提案を行っている。
COPYRIGHT ©2019 PONGSATHORN LAB. ALL RIGHTS RESERVED.
ページトップへ