高齢者運転支援(JST-Sイノベ)(2010-2019)
高齢者の自立を支援し安全安心社会を実現する自律運転知能システム
(JST-Sイノベ 2010-2019年度)
本プロジェクトは,科学技術振興機構 (JST)、戦略的イノベーション創出推進プログラム(S-イノベ)の研究開発テーマ「高齢社会を豊かにする科学・技術・システムの創成」において、平成22年度から令和元年度までの10年間採択された。
開発の狙い
高齢者が自立して元気に生活していくためには安心安全な移動手段が欠かせず、中でも自動車は日常の足として大変重要と考えられます。 特に、地方地域のように歩ける範囲だけでは生活できず、また公共交通の貧弱なところでは、自動車運転が必須となっています。 しかしながら、加齢による身体能力の低下によって、事故の危険リスクが高まります。 実際、高齢者の交通事故数は上昇傾向にあり、また高齢運転者数も今後20年で倍増することが確実視されています。 そこで、高齢者の日常生活を支える意味において、安全安心な移動の達成をゴールとして、その手段に、センサー技術、危険予知判断技術、危険回避技術などの研究開発とともに、 このシステムの実証実験により効果評価や社会的受容性の検証を行うことで、高齢者の運転能力の低下をバックアップし、事故を回避する自律運転知能を持つ安全運転支援システムの確立とその市販化を目指しています。
研究開発「自律運転知能システム」の全体コンセプト
本研究では、高齢者の日常生活の移動支援を最重点課題として設定し、高度運転支援の機能の範囲を限定することにより早期実現・社会導入を目指している。
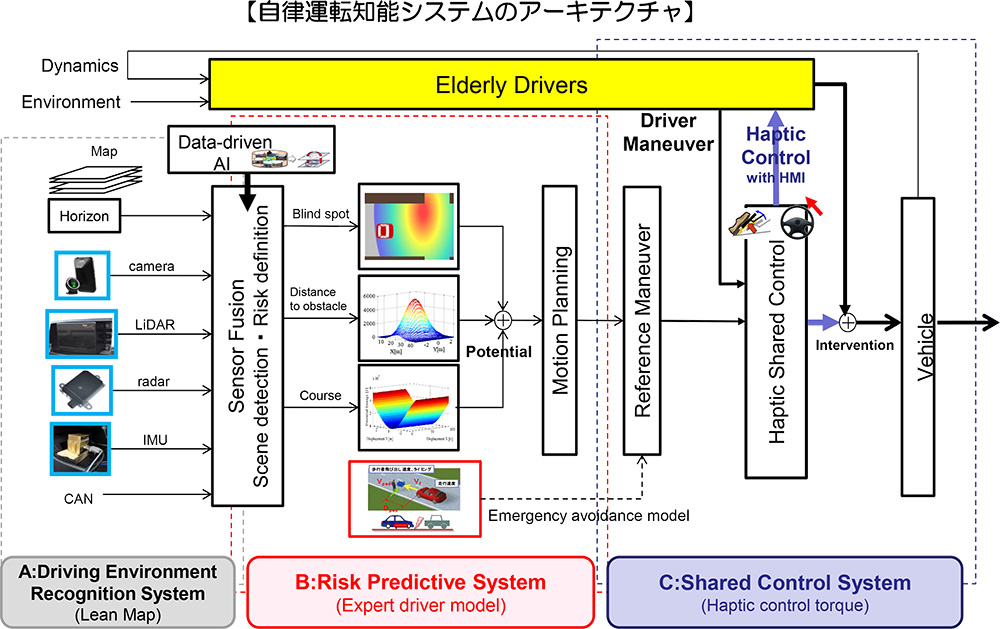
高度運転支援システムの基盤技術の柱としては従来の予防安全技術に加えて、高精度の道路環境センシング技術(画像、LIDAR、レーダ、GNSS)、デジタルデータ(地図データ、周辺映像データ)、自律運転知能化技術(周辺認識、知識データベース、リスクポテンシャル予測)、高齢運転者診断技術(ドライバモデル、ドライバ受容性)、運転操作系HMI最適化技術などが挙げられる。
これらの技術を有機的に統合し、高齢者による危険回避が困難と判定した際に自律運転知能による強制介入制御を実施する。活用用途としては、地方地域の高齢者のモビリティ支援としての安全自動車を当面の目標とし、 技術開発は継続的に行い、動作範囲の拡張やさらなる高機能化を実現していくことを目指す。 実現可能性へのハードルの高い完全自動運転を目指すのではなく、運転者が主で機械支援が従のシステムであるので、運転者の受容性や社会受容性は十分検討する必要があるものの、実現可能性は十分高い。
本プロジェクトで最終的に目指す事故防止機能としては、高齢者の日常生活エリアでの比較的低速走行を対象とし以下の機能を有するものとする。
- 先行車への追突回避
- 自転車や歩行者への衝突回避
- 走行レーンからの逸脱回避
- 非優先交差点での一時停止無視への制御介入
そのため、ドライブレコーダーで取得したヒヤリハットシーンにより、交通事故死者の多い典型的なシーンのリスクシナリオを設定する。なお車両単独の自律制御による運転支援を基本とするが、車車間、路車間情報も活用できるシステムを構築する。
潜在リスク予測型運転支援システムに関する研究
高齢者が自立して元気に生活していくためには安心安全な移動手段が欠かせず、中でも自動車は日常生活を支える意味において重要と考えられる。 しかしながら、加齢による身体能力の低下などにより、事故の危険が高まっている。
そこで、高齢者の安全で安心な移動を達成するために、センサー技術、危険予知判断技術、危険回避技術などの研究やシステムの実証実験を行っている。 これらの研究開発や実験により、高齢者の運転能力の低下をバックアップし、事故を回避する自律運転知能を持つ安全運転支援システムの確立とその市販化を目指している。
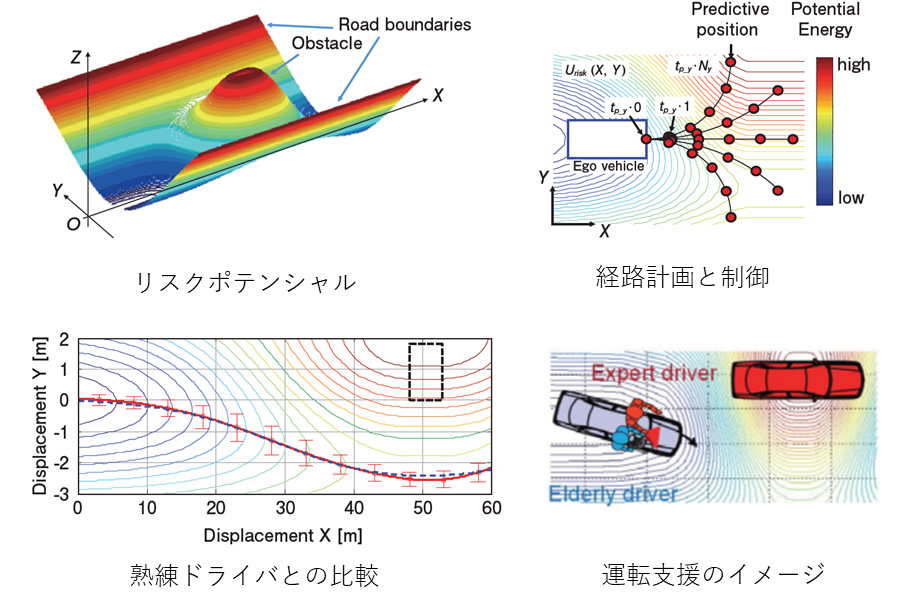
リスクポテンシャル場に基づく経路計画・制御アルゴリズム
本研究では、人間と協調する自動運転の基盤技術として、センシングによって得られた走行環境・道路文脈を理解し、経験知識から合理的に潜在リスクを予測・先読みし、取るべき規範運転を決定し、安全な走行を実現する自律運転知能システムの開発を目的とする。熟練ドライバの特性に基づき設定されたリスクポテンシャルを用いて、車両の前後方向・横方向の運動制御を設計し、衝突リスクが高まった際に早い段階で各種操作系の操作力の制御介入を実行して、安全運転を支援する。触覚的な協調制御(Haptic Shared Control)による制御介入インタフェイスを用いて、オーバーライドを可能とし、人間と機械が常時協調して安全で快適な運転を実現する。
- 本研究の成果の一部は、2016年堀場雅夫賞を受賞しました。
- http://www.mh-award.org/year/2016/3/
- https://www.tuat.ac.jp/NEWS/winning/20160729_01.html
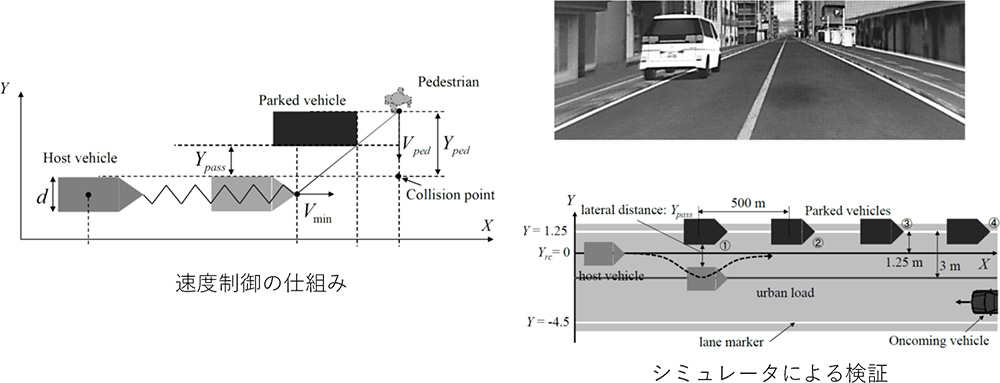
死角に対する潜在リスク予測ブレーキ支援
オクルージョン(遮蔽物)が存在する場所において歩行者の飛び出しリスクがあるため、万が一のケースに備えて事前の減速操作が望ましい。本研究では、(1) 見通し悪環境での歩行者の急な飛び出しを数理モデルで定義し、(2)既存研究で構築した運転指導員の防衛的な減速行動 を模擬できるリスクポテンシャル最適化理論に基づく運動計画を用い、(3)ペダル反力を用いたアクセルオフを促す触覚 的誘導支援手法を開発し、これらを有機的に結合させたブレーキ制御支援システムを構築した。
- 本研究の成果の一部は、「第68回自動車技術会賞 論文賞」を受賞しました。
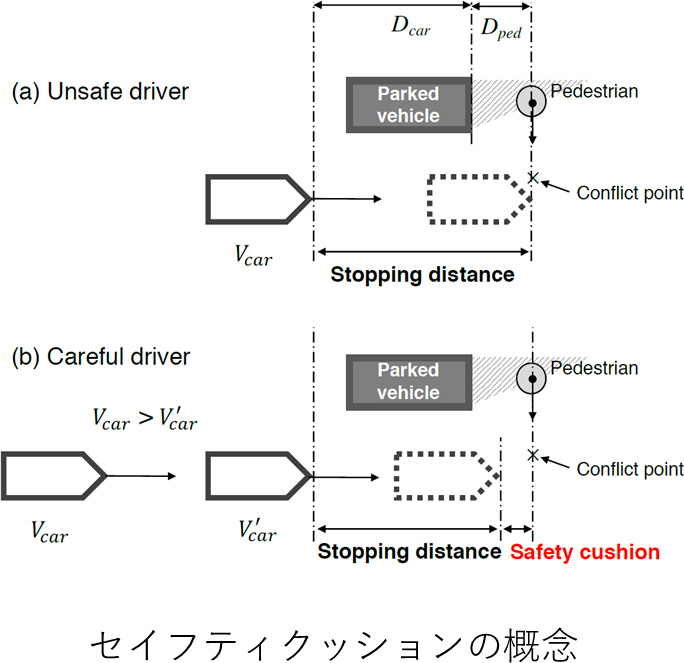
Safety Cushion Model:交通文脈に適合した危険度推定手法
本研究では、走行環境の文脈、および運転行動状態の情報を用いて、数秒先に起こりうる歩行者飛び出しの事象発生時の危険度を推定するモデルの構築方法を提案した。歩行者の飛び出し事象の発生時の危険度を表す指標として猶予時間 (safety cushion time) を定義した。また、ヒヤリハットデータベースから、走行環境文脈のタグ付け情報と、事象が起きる前の運転行動状態を表す速度の特徴量による危険度推定重回帰モデルを構築し、リスク予測型ブレーキ支援の設計に活かす。
COPYRIGHT ©2019 PONGSATHORN LAB. ALL RIGHTS RESERVED.
ページトップへ